Electric motors are the workhorses of industry, driving everything from small pumps to massive conveyor systems. However, the way these motors are started can significantly impact their lifespan, the mechanical integrity of the driven equipment, and the overall efficiency of an electrical system. Choosing the appropriate motor starting method is a critical engineering decision that balances factors like inrush current, starting torque, cost, and control sophistication.
This comprehensive guide will explore the most common motor starting methods: Direct-On-Line (DOL), Star-Delta (Wye-Delta), Soft Starters, and Variable Frequency Drives (VFDs). We will delve into their operational principles, advantages, disadvantages, and ideal applications to help you make an informed choice for your specific needs.
Direct-On-Line (DOL) starting, also known as full-voltage starting, is the simplest and most common method for starting AC induction motors. In this method, the motor is connected directly to the full mains voltage supply via a contactor. When the contactor closes, the motor immediately receives full voltage and frequency.
Operational Principle: The motor draws a very high inrush current (typically 5 to 8 times its full load current, and sometimes even up to 10-12 times) and develops its full starting torque almost instantaneously. The motor accelerates rapidly to its operating speed.
Advantages:
•Simplicity: Very simple control circuit and minimal components (contactor, overload relay).
•Low Cost: Generally the least expensive starting method.
•High Starting Torque: Provides maximum starting torque, which can be beneficial for certain loads.
Disadvantages:
•High Inrush Current: The primary drawback is the very high inrush current, which can cause significant voltage dips in the supply network, affecting other connected equipment. It can also lead to higher electricity bills due to demand charges.
•High Mechanical Stress: The sudden application of full torque creates mechanical shock and stress on the motor, gearbox, coupling, and driven equipment, leading to premature wear and tear.
•No Speed Control: Offers no control over the motor's speed once started.
Ideal Applications: Small motors (typically up to 5-10 kW, depending on local regulations and supply capacity) where the power supply can handle the inrush current, the mechanical load can withstand high starting torque, and speed control is not required (e.g., small fans, compressors, pumps).
2. Star-Delta (Wye-Delta) Starting
Star-delta starting is a reduced-voltage starting method commonly used for medium-sized three-phase induction motors. It aims to reduce the high inrush current associated with DOL starting.
Operational Principle: The motor windings are initially connected in a star (wye) configuration during startup. In this configuration, each phase winding receives a reduced voltage (1/√3 or approximately 58% of the line voltage). This reduces the starting current to about one-third of the DOL current and the starting torque to about one-third of the DOL torque. After the motor has accelerated to a certain speed (typically 75-80% of its full speed), a timer switches the winding connection from star to delta (triangle) configuration, applying full line voltage to each winding for normal operation.
Advantages:
•Reduced Starting Current: Significantly reduces inrush current compared to DOL starting, mitigating voltage dips.
•Reduced Mechanical Stress: Lower starting torque reduces mechanical shock on the system.
•Cost-Effective: More complex than DOL but generally less expensive than soft starters or VFDs.
Disadvantages:
•Reduced Starting Torque: The motor develops only about one-third of its DOL starting torque, which may not be sufficient for heavy loads.
•Open Transition: The brief interruption of power during the star-to-delta transition can create transient currents and mechanical shocks, though closed transition systems exist to mitigate this.
•Fixed Speed: Like DOL, it offers no speed control during normal operation.
•Requires Special Motor: The motor must be designed for star-delta operation, meaning all six terminals of the stator windings must be accessible.
Ideal Applications: Medium-sized motors (typically 10 kW to 100 kW) driving loads that do not require high starting torque, such as pumps, fans, and compressors, where a reduction in starting current is necessary.
3. Soft Starters
Soft starters are electronic devices that provide a gradual ramp-up of voltage to the motor, resulting in a smooth, controlled acceleration. They are essentially a more sophisticated alternative to star-delta starters for reducing inrush current and mechanical stress.
Operational Principle: Soft starters use Solid-State Devices (SCRs or thyristors) to control the voltage applied to the motor. By gradually increasing the conduction angle of the SCRs, the voltage supplied to the motor is smoothly ramped up from a low initial value to full line voltage over a user-defined period. This results in a controlled increase in both current and torque.
Advantages:
•Smooth, Stepless Acceleration: Provides very smooth and controlled acceleration and deceleration, minimizing mechanical shock and stress.
•Reduced Inrush Current: Significantly reduces starting current, typically to 3-4 times FLA, preventing voltage sags.
•Extended Equipment Lifespan: Protects the motor and driven equipment from mechanical stress, extending their operational life.
•Adjustable Ramp Times: Allows for flexible adjustment of acceleration and deceleration times to suit the application.
Disadvantages:
•No Speed Control: Once the motor reaches full speed, the soft starter bypasses its control, and the motor runs at fixed speed. It cannot vary the motor speed during normal operation.
•Heat Dissipation: The SCRs generate heat during the ramp-up period, requiring adequate cooling.
•Cost: More expensive than DOL and star-delta starters.
Ideal Applications: Motors driving loads where smooth acceleration and deceleration are critical, and speed control is not required. Examples include conveyors, pumps (to prevent water hammer), fans, and mixers, especially for larger motors where DOL or star-delta starting is unsuitable.
4. Variable Frequency Drives (VFDs)
Variable Frequency Drives (VFDs), also known as AC drives or inverters, are the most advanced motor control devices. They not only provide soft starting capabilities but also offer precise control over the motor's speed and torque throughout its entire operating range.
Operational Principle: VFDs convert the incoming fixed-frequency, fixed-voltage AC power into variable-frequency, variable-voltage AC power for the motor. This is achieved through a three-stage process: rectification (AC to DC), DC bus filtering, and inversion (DC to variable AC using Pulse Width Modulation - PWM). By varying both the frequency and voltage, VFDs maintain an optimal V/Hz ratio, allowing the motor to operate efficiently at any desired speed.
Advantages:
•Full Speed Control: Provides continuous and precise control over motor speed and torque, allowing the motor to match the exact requirements of the load.
•Excellent Energy Savings: Particularly in variable torque applications (fans, pumps), VFDs can deliver substantial energy savings by reducing motor speed.
•Soft Starting and Stopping: Eliminates high inrush currents and mechanical shock, extending equipment lifespan.
•Improved Process Control: Enables fine-tuning of processes, leading to higher product quality and reduced waste.
•Power Factor Correction: Some advanced VFDs can improve the overall power factor of the system.
Disadvantages:
•Highest Initial Cost: VFDs are generally the most expensive starting method.
•Harmonic Distortion: Can introduce harmonic currents into the power system, potentially requiring harmonic filters.
•Complexity: More complex to install, program, and troubleshoot compared to other methods.
•Motor Compatibility: Older motors or those not designed for VFD duty may require special considerations (e.g., insulated bearings, VFD-rated insulation).
Ideal Applications: Any application where precise speed control, significant energy savings, or very smooth acceleration/deceleration is required. This includes HVAC systems, water treatment plants, conveyors, extruders, and any process with variable load demands.
Conclusion
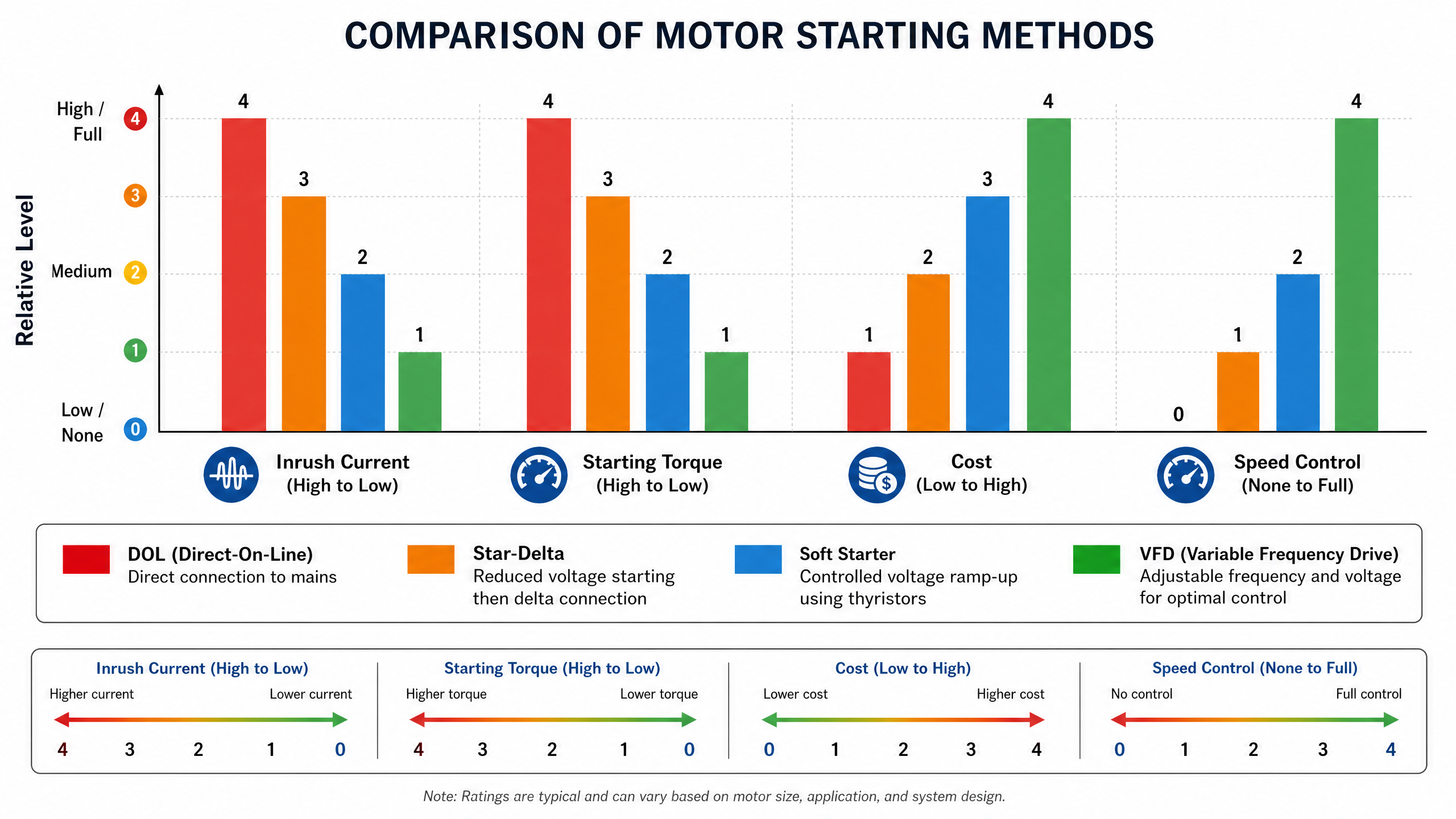
Choosing the right motor starting method is a critical decision that impacts operational efficiency, equipment longevity, and energy consumption. While Direct-On-Line starting offers simplicity and low cost for small, non-critical loads, its high inrush current and mechanical stress make it unsuitable for larger applications. Star-delta starters and soft starters provide effective solutions for reducing starting current and mechanical shock for medium to large motors where continuous speed control is not a priority.
For ultimate control, energy efficiency, and process optimization, Variable Frequency Drives are the superior choice, despite their higher initial cost and complexity. By carefully evaluating the motor size, load characteristics, power supply limitations, and desired level of control, engineers can select the optimal starting method that ensures reliable, efficient, and long-lasting motor operation. The investment in the right starting technology often pays dividends in reduced maintenance, lower energy bills, and improved overall system performance.
No comments:
Post a Comment